请教下各位大神,如何在DynamicalSystems.jl中定义一个这样的动态系统?
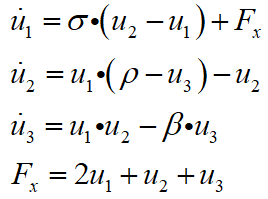
其中,Fx是u1、u2、u3的函数(为方便描述,这里做了简化)
using DifferentialEquations,
DynamicalSystems
function foo1(x, i)
i*x
end # function
function foo2(x, y, z)
x̄ = (x + y + z)/3.0
println(typeof(x))
k = zeros(3, 3)
for i in 1:3
for j in 1:3
k[i, j] = foo1(x̄, j)
end
end
return sum(k)
end
foo2(1.0, 2.0, 4.0)
@inline @inbounds function lorenz!(du,u,p,t)
Fx = foo2(u[1], u[2], u[3])
σ, ρ, β = p
du1 = σ*(u[2] - u[1]) + Fx
du2 = u[1]*(ρ - u[3]) - u[2]
du3 = u[1]*u[2] - β*u[3]
end
function test_DS()
u0 = 0.1*ones(3)
p = 10.0, 28.0, 8/3
ds = ContinuousDynamicalSystem(lorenz!, u0, p)
end # function
运行报错
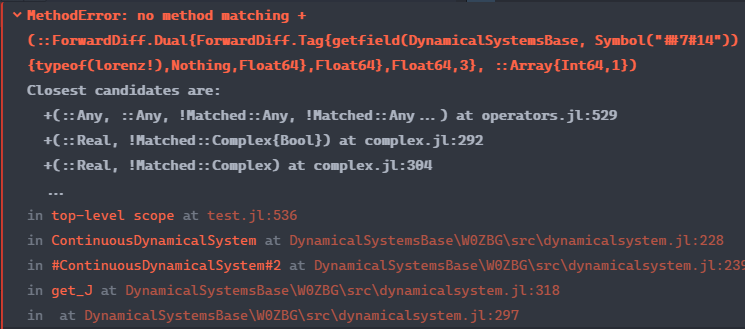
请教各位解决方法,谢谢了!